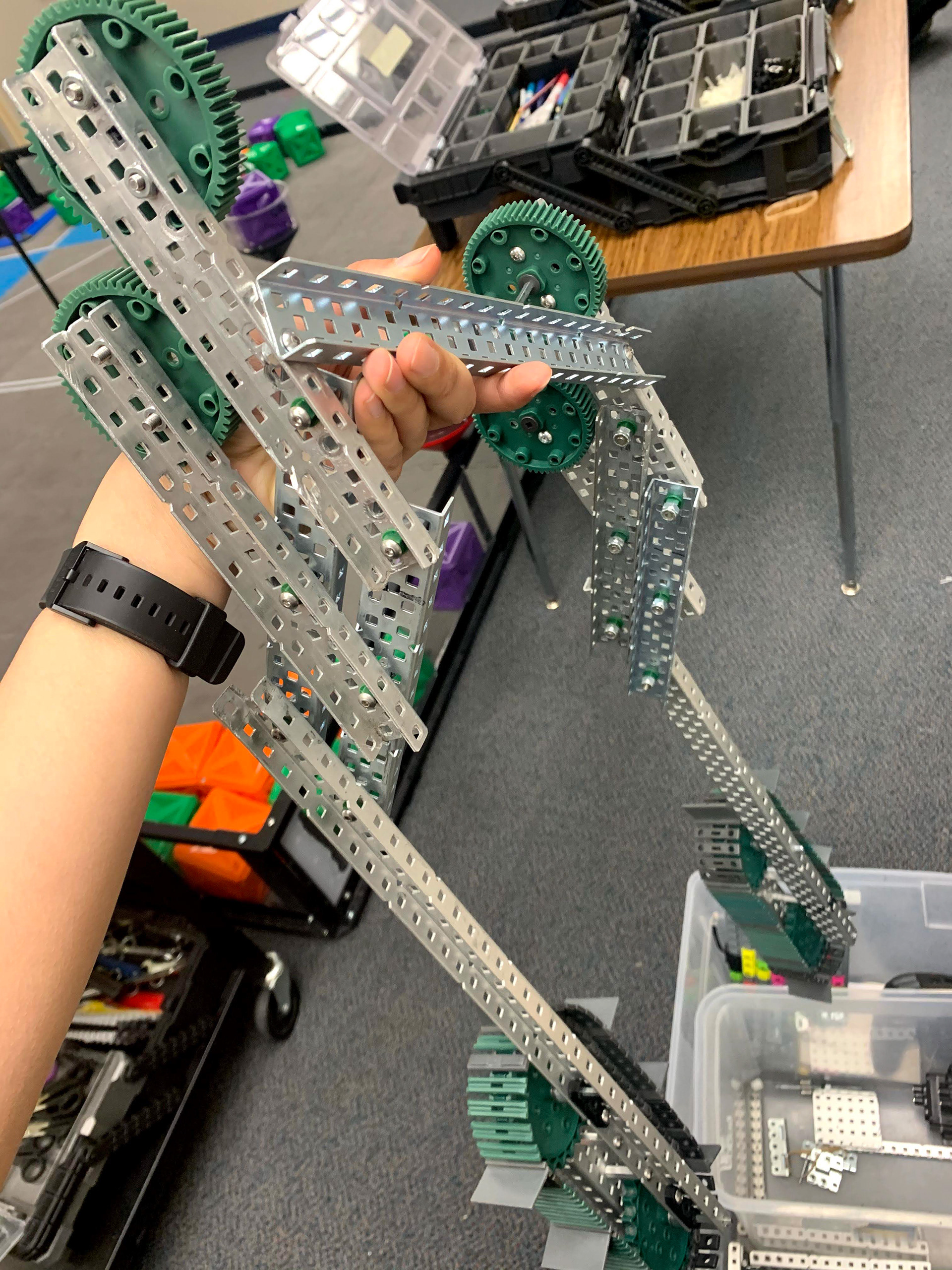
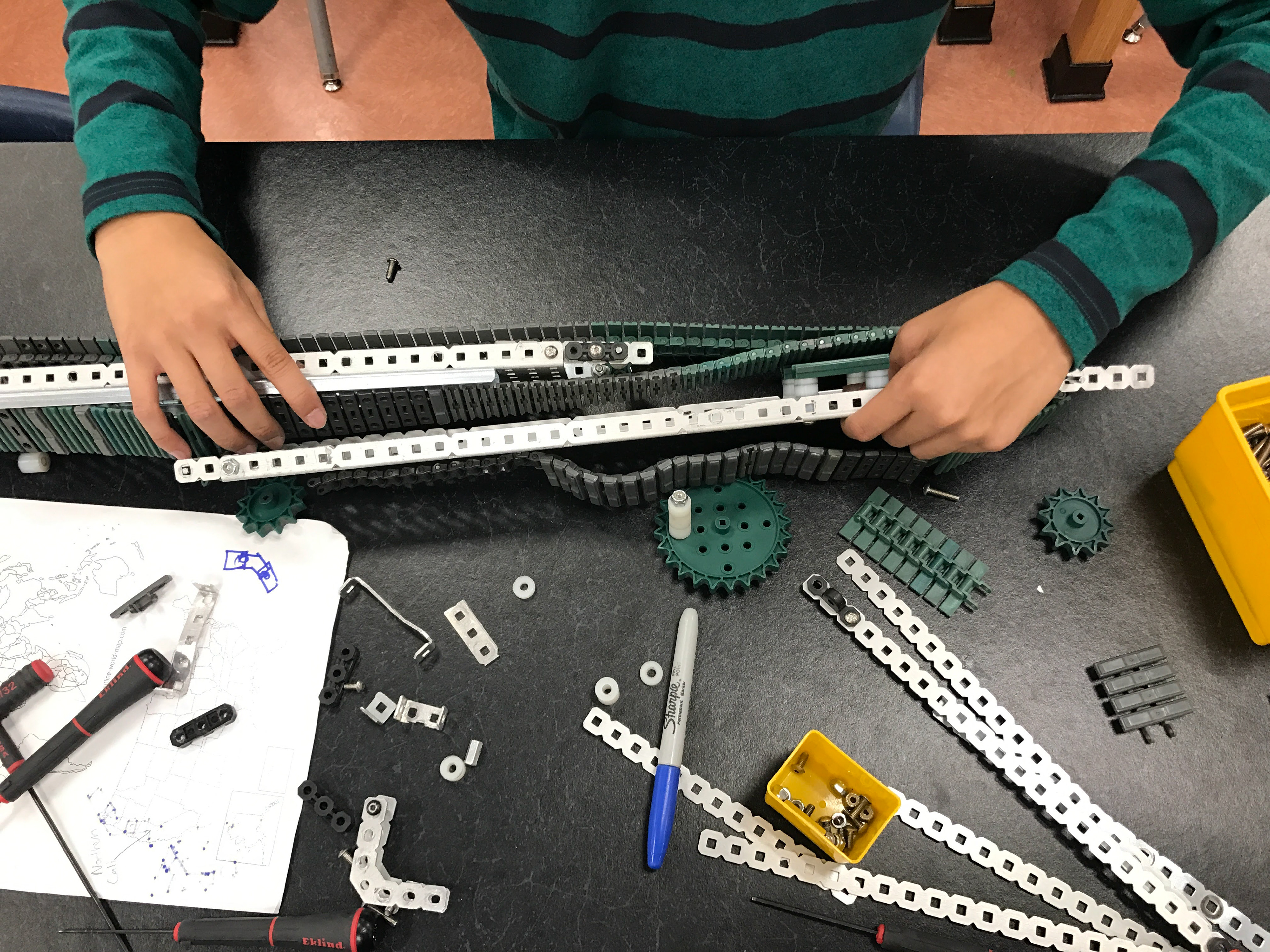
me and the big pile of buid supplies I hauled home every weekend to work on machines
Skills
dremeling, gearbox configuring, drivetrain assembly, VEX CAD, extension/lift rigging, C++, manual tooling, electronic sensors (potentiometers, shaft encoders, ultrasonic range finder, etc.)
Year
2014-2020
Affiliation
VEX Robotics
Recognition
Qualified for the VEX Robotics World Championship, the largest international robotics competition
Local Circuit Awards: Think Award, Create Award, Design Award, Programming Skills Champion, Excellence Award, Tournament Champion
7th Grade (Skyrise)
my first VEX robot: a simple claw bot with a 4-wheel drivetrain
the moment our robot first properly turned on






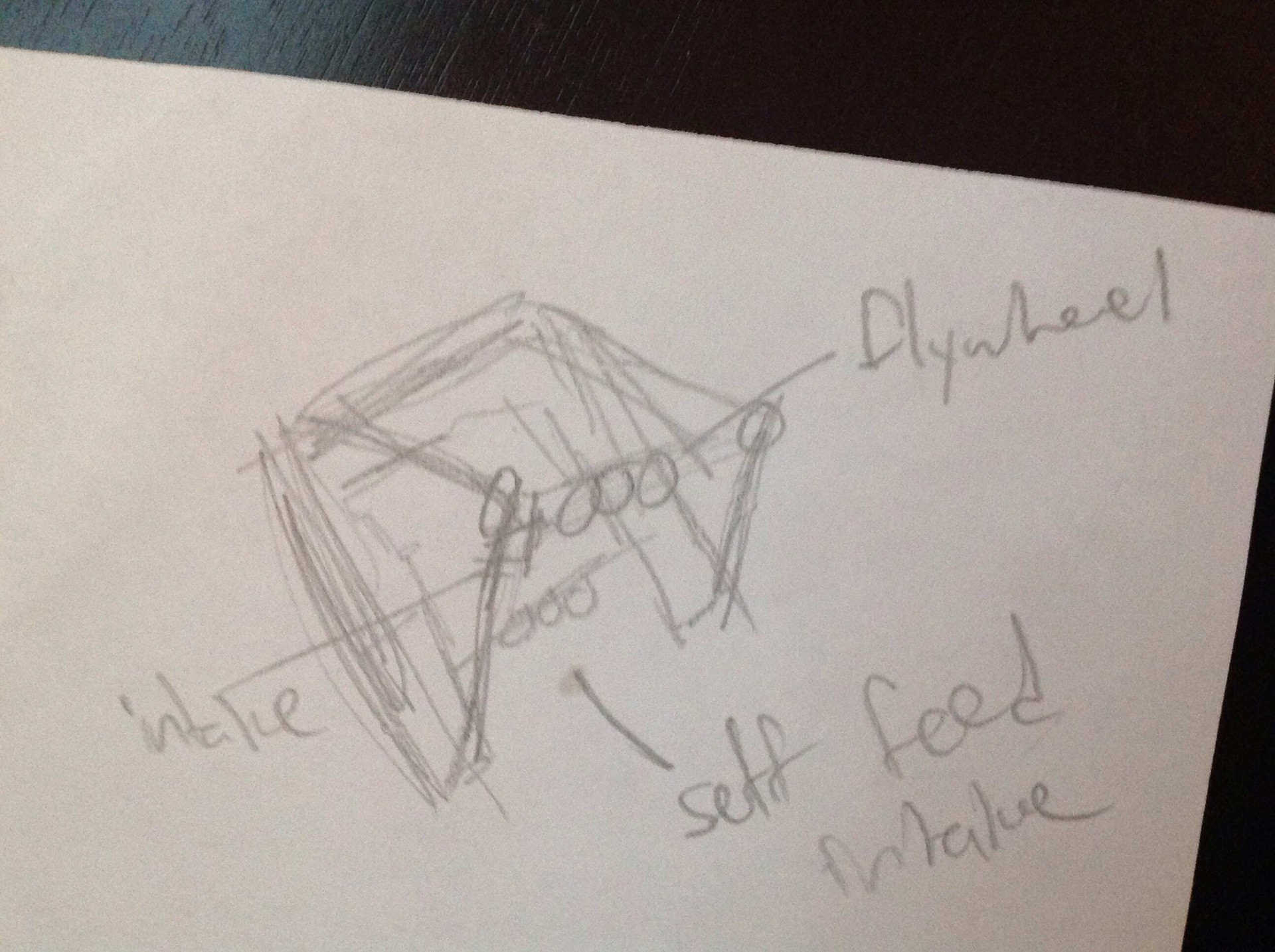
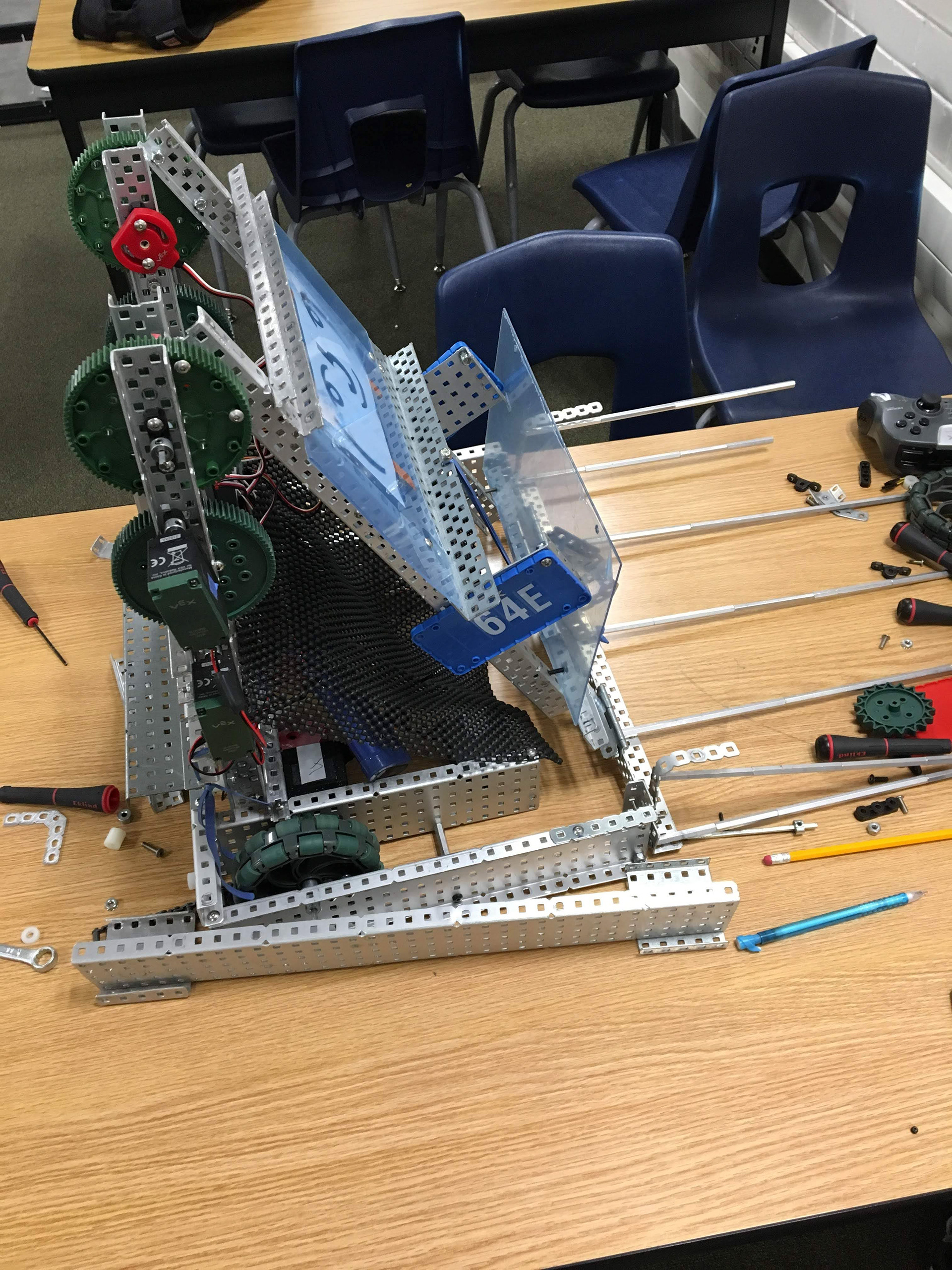
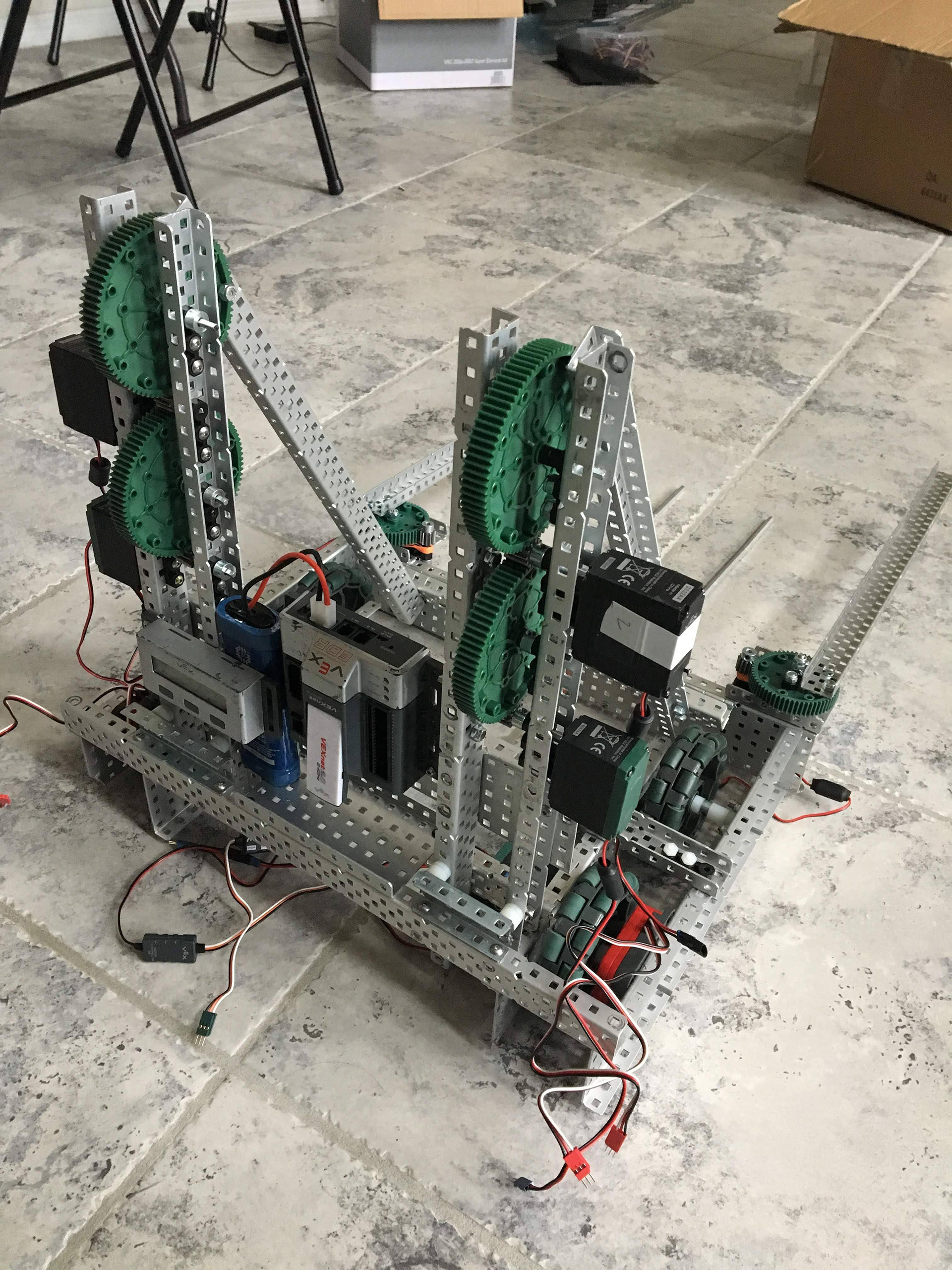
8th Grade (Nothing but Net)
the Quantum bot: equipped with a 4-wheel drive train, horizontal gear intake, vertical tread intake, and double-sided flywheel




9th Grade (Starstruck)
the Lenny bot: equipped with a 4-wheel omni-drivetrain, high-torque gearing system for strong lifts, deployable forklift, acrylic shields, and a horizontal claw



10th Grade (In the Zone)
equipped with a custom-fit intake for cones, a claw for precise grabs, a thinner drivetrain to maximize intake area, and shaft sensors to precise measure the number of rotations a wheel makes
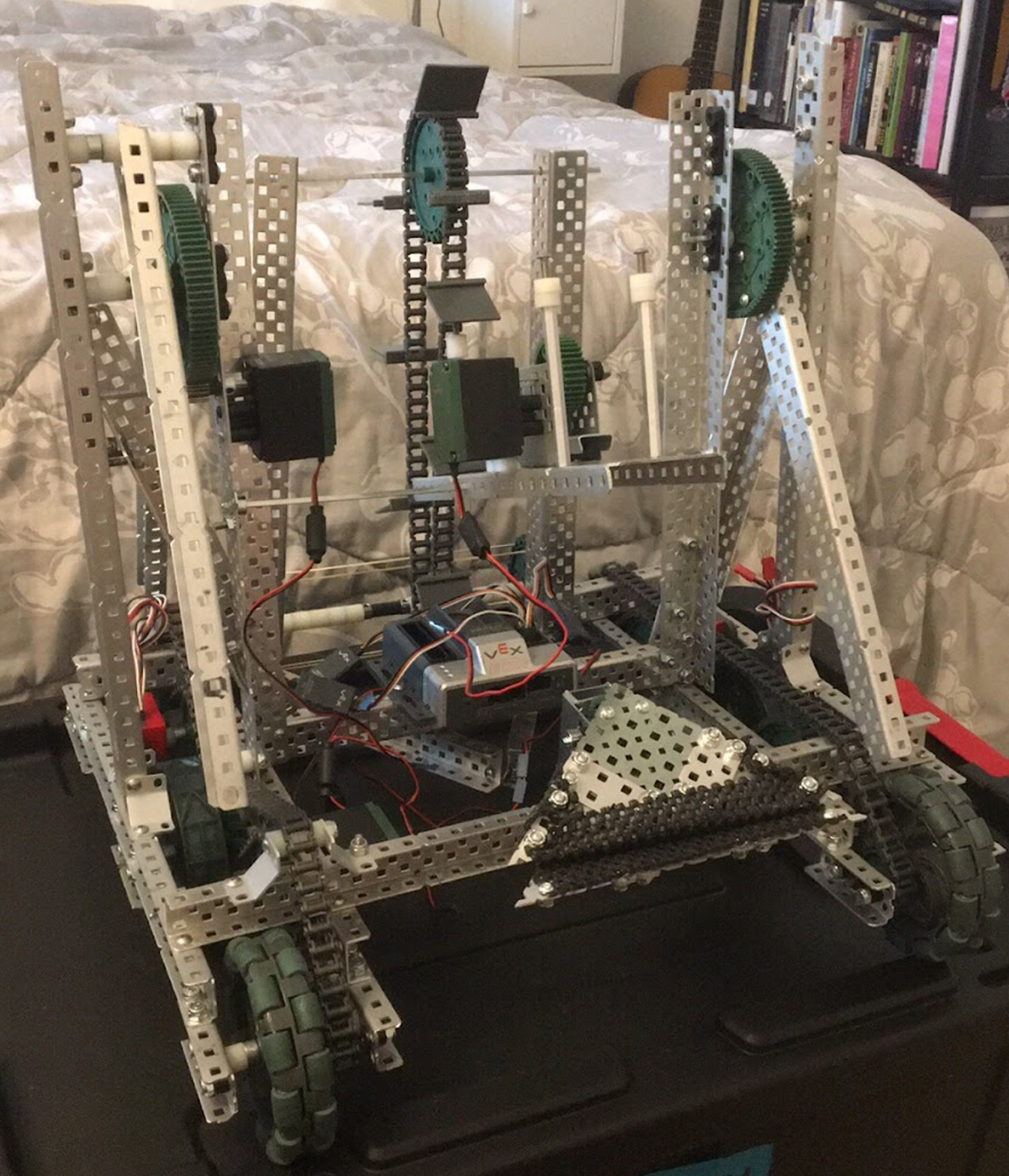




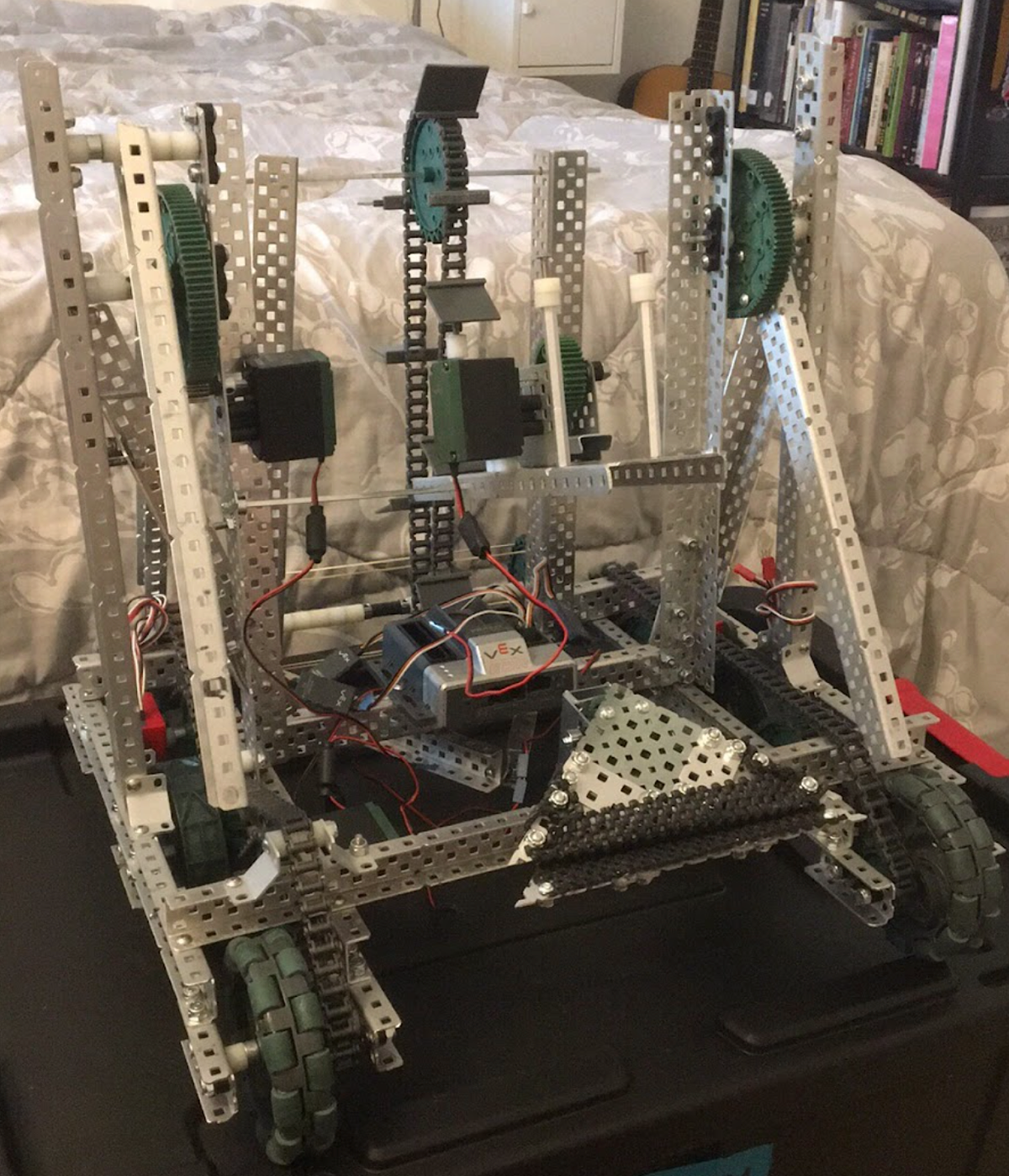
11th Grade (Turning Point)
equipped with a double-reverse 4-bar lift, 4-wheel chained drivetrain, vertical claw close, and vertical tread system




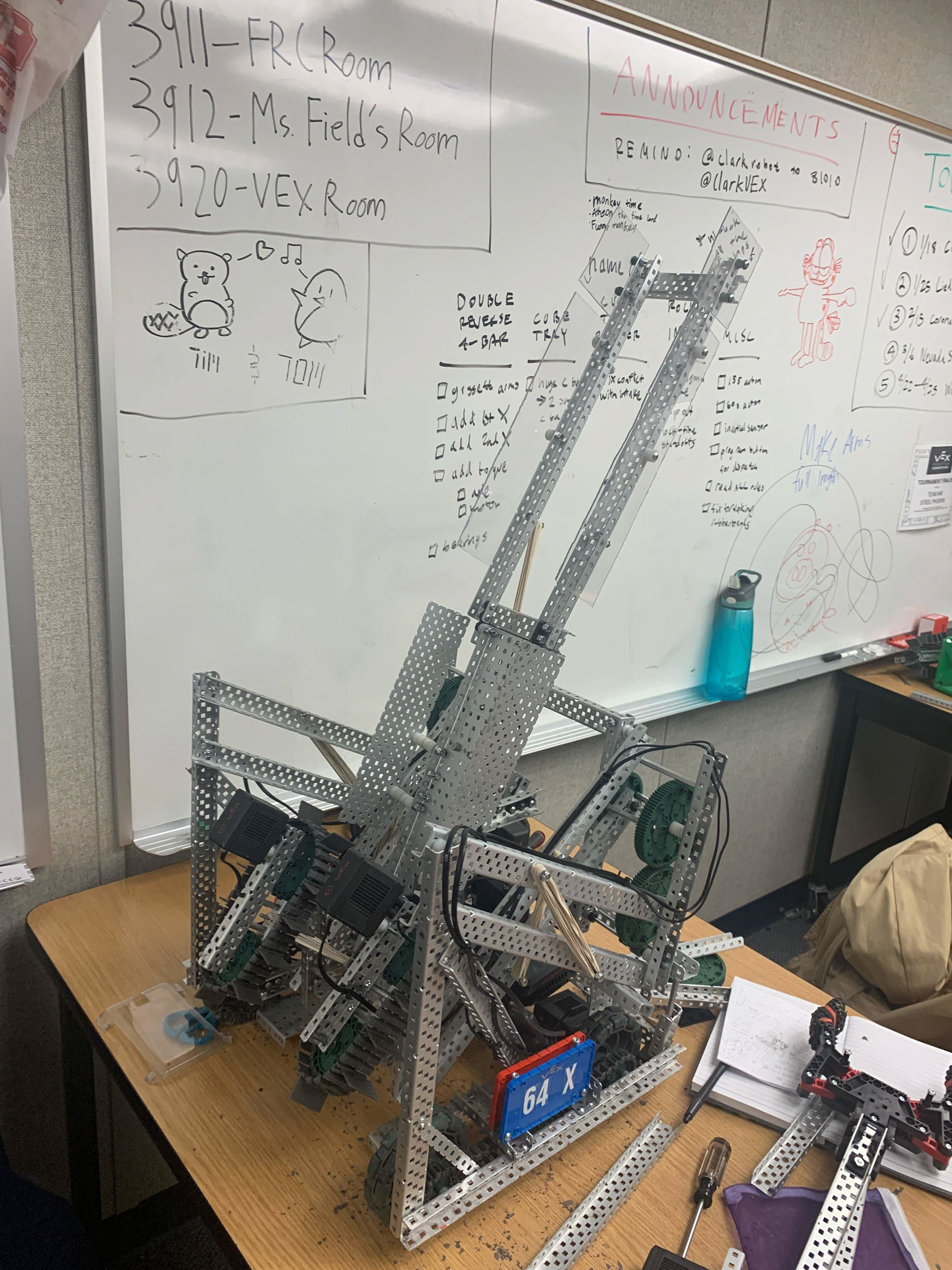
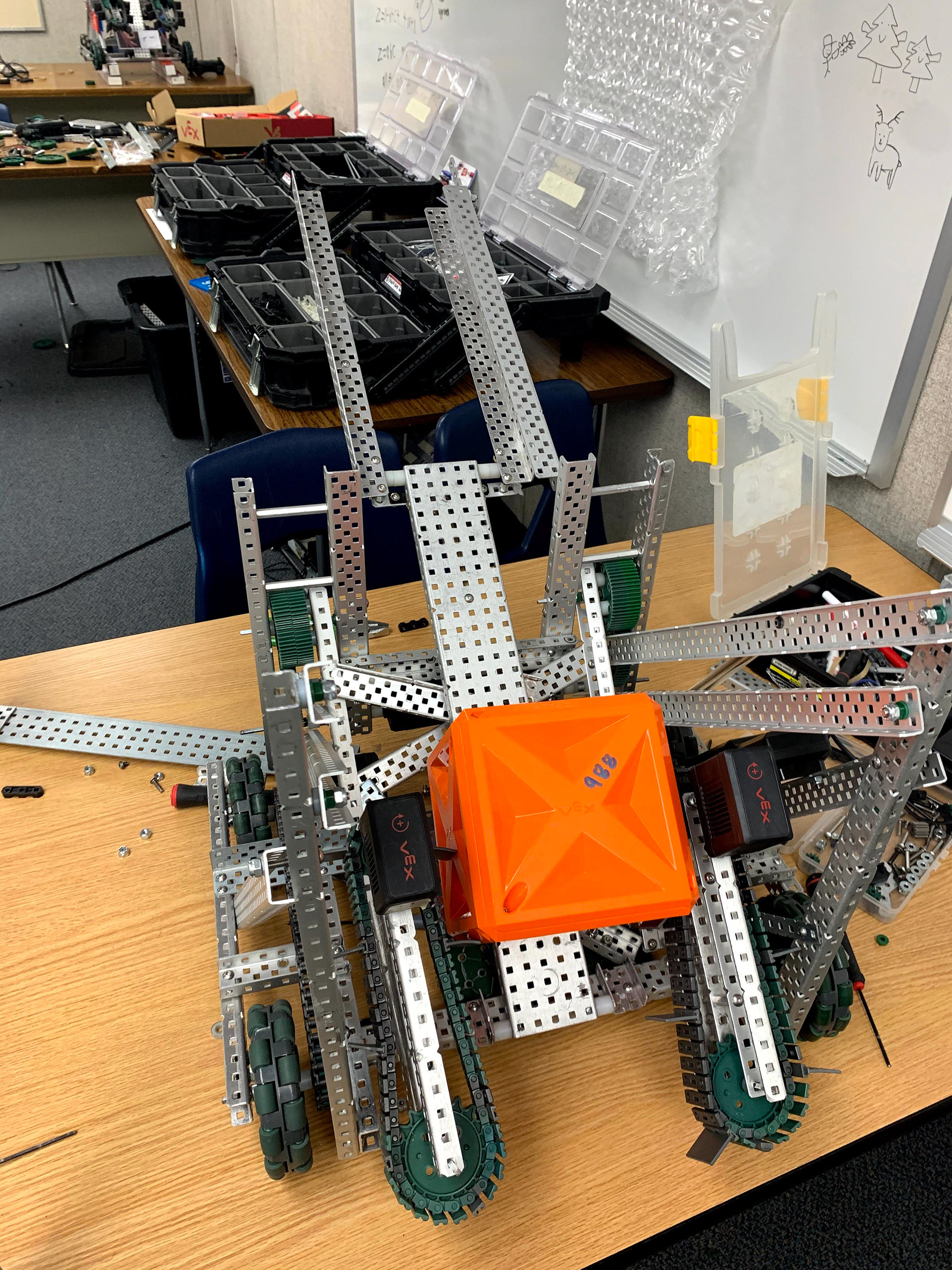
12th Grade (Tower Takeover)
equipped with a 4-wheel omni-drive, diagonal tread intake system, deployable vertical cube holder, double-reverse 4-bar lift, and torque gearbox for placing stacks of cubes